
keenonロボットパラメタ設定
①xshell、pasonal無料版をDL、PCにインストール
②PCのWiFi設定:Keenon robotのAPに接続、ロボットも同じAPに接続(注:ロボットとPC以外のデバイスは同APに接続しないこと)
Xshellを起動すると
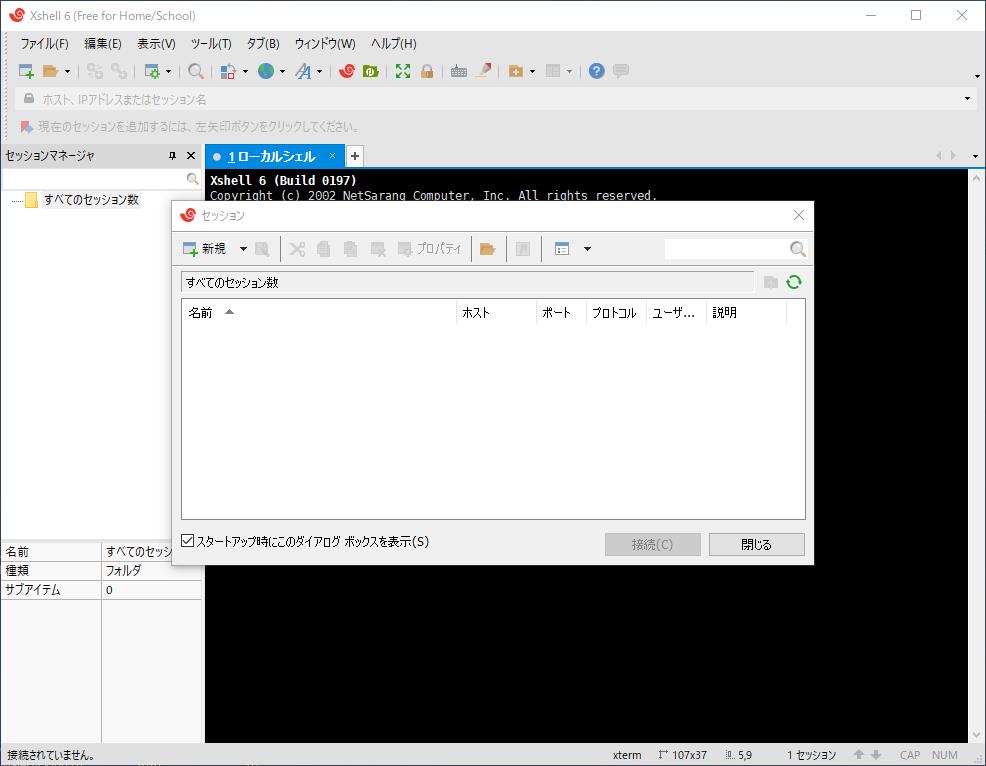
③セッションの新規をクリック
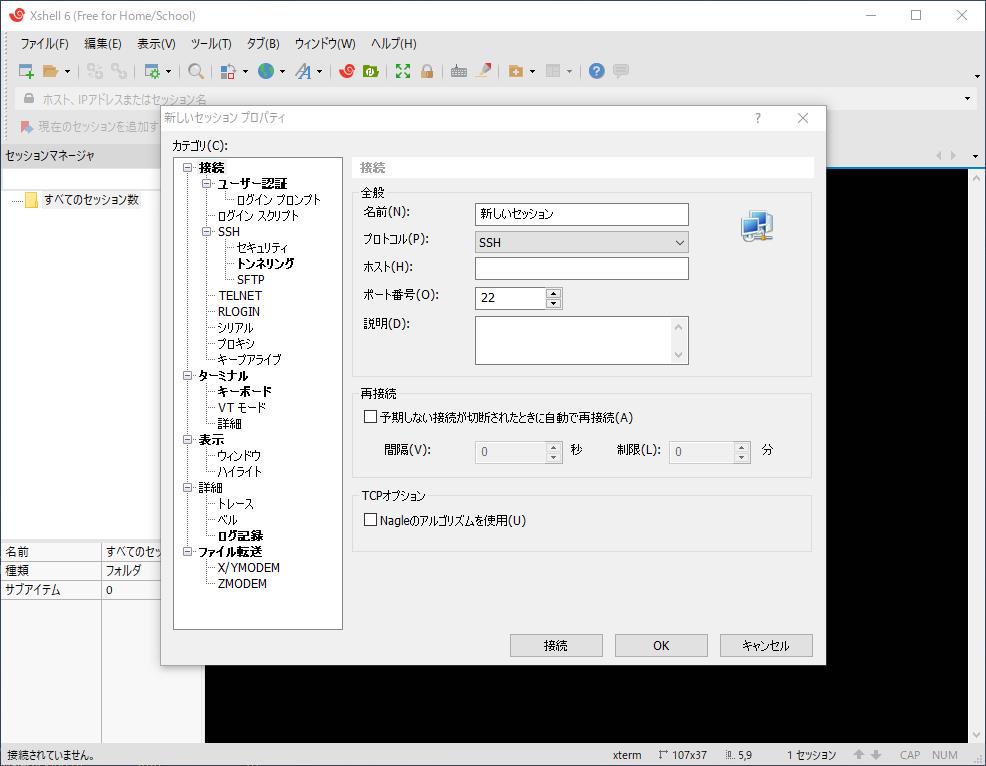
名前:自由設定
ホスト:ロボットのIPアドレス
接続をクリックするとログイン画面が出ます。
ユーザー名:root ,パースワード:keenon
と入力、接続すると下記の画面が出ます。
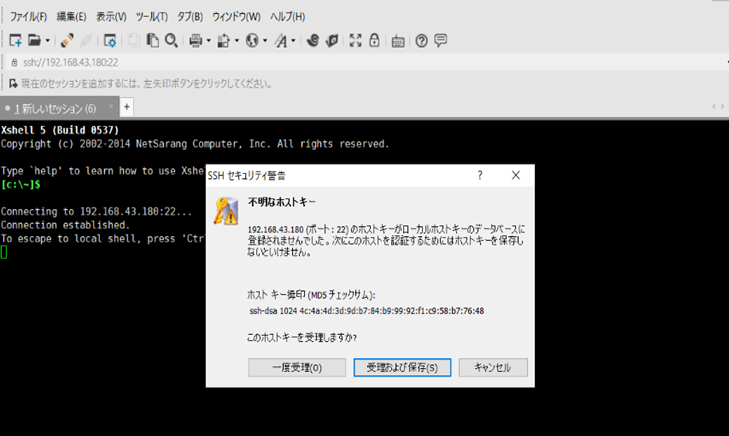
[受理および保存]をクリック
これでロボットにログインできました。
④ログイン後、Command入力:cd /work/robot/Bin/Arm-Release 、そしてEnter
⑤Command入力:vi param 、そしてEnter![]()
⑥キーボードの” i “を押す
⑦設定項目が現れる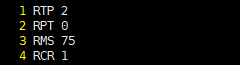
ロボットはバージョン1.4だと上記の4つの項目を変更可能、
1 RTP 2 ロボットの種類、機種を登録可能
2 RPT 0 変更不要
3 RMS 75 スピード、30-100まで調整可能
4 RCR 1 障害物避け開始距離、0~10
大きいマーカーのパラメタを設定する際、下に下記の項目を追加してください
RLN 20000
RLS 1.2
⑧パラメタを修正完了後、ESCキーを押す
⑨Shift+を押す
⑩“:wq”を入力,そしてEnter
⑪ロボットを再起動する
これで修正されたパラメタが有効になります。
keenonロボットのOSの変更
①Xshellでロボットにつながった状態で、コマンド、ps -ef | grep guard を入力し、ロボットのプログラムに入ります。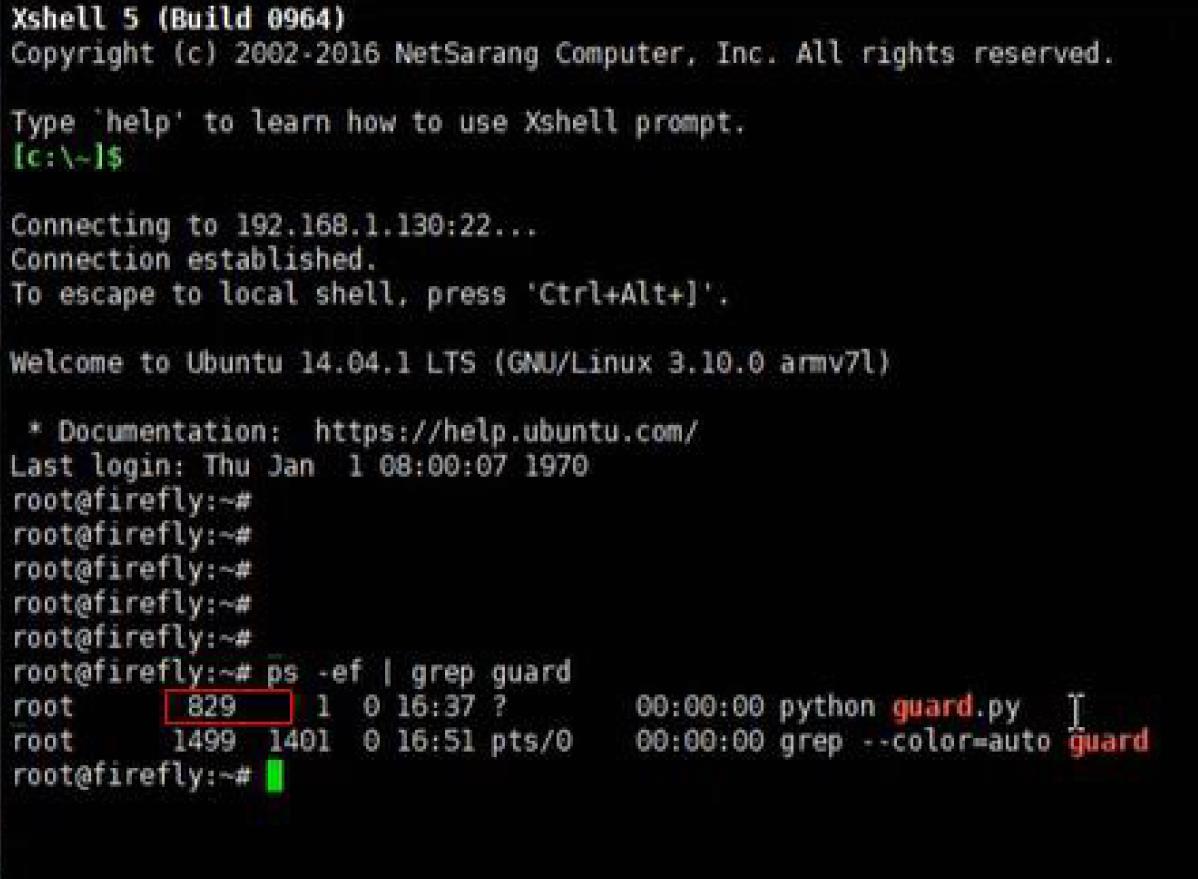
赤い枠内の数字を控えてください。
②コマンド、top を入力し、ロボットのタスクステータスに入ります。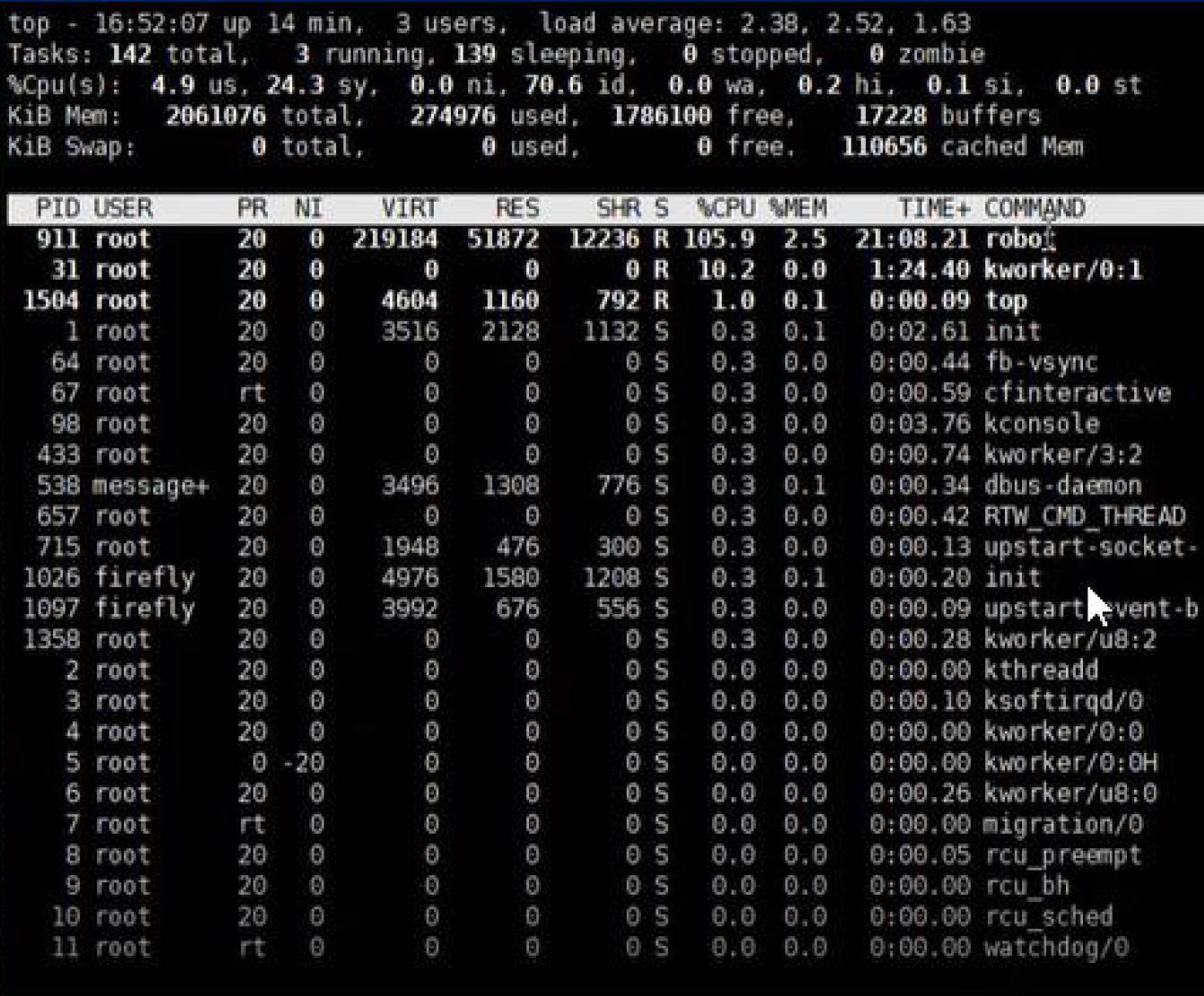
③コマンド入力、k 赤い枠内の数字 enter enter
④コマンド入力、k enter enter
⑤FTPソフト、winscpを使い、ロボットにアクセスする、IPはロボットのIPアドレス、ユーザー名:root ,パースワード:keenon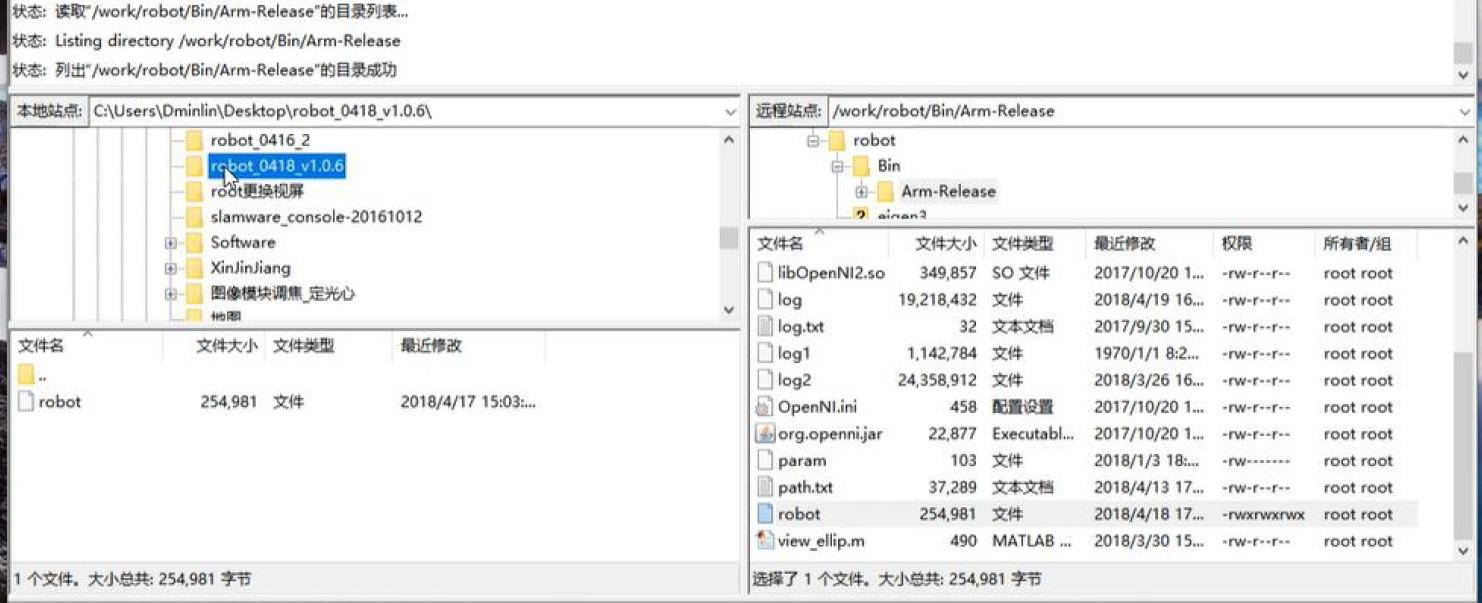
⑥メーカーからもらったロボットOSファイル(左側)→右側古いロボットOSを上書きする。フォルダーは work/robot/Bin/Arm-Release
⑦xshellの画面に戻り、Ctrl + c と入力してください。
⑧cd .. と入力し、enter
⑨cd work/robot/Bin/Arm-Release と入力をし、enter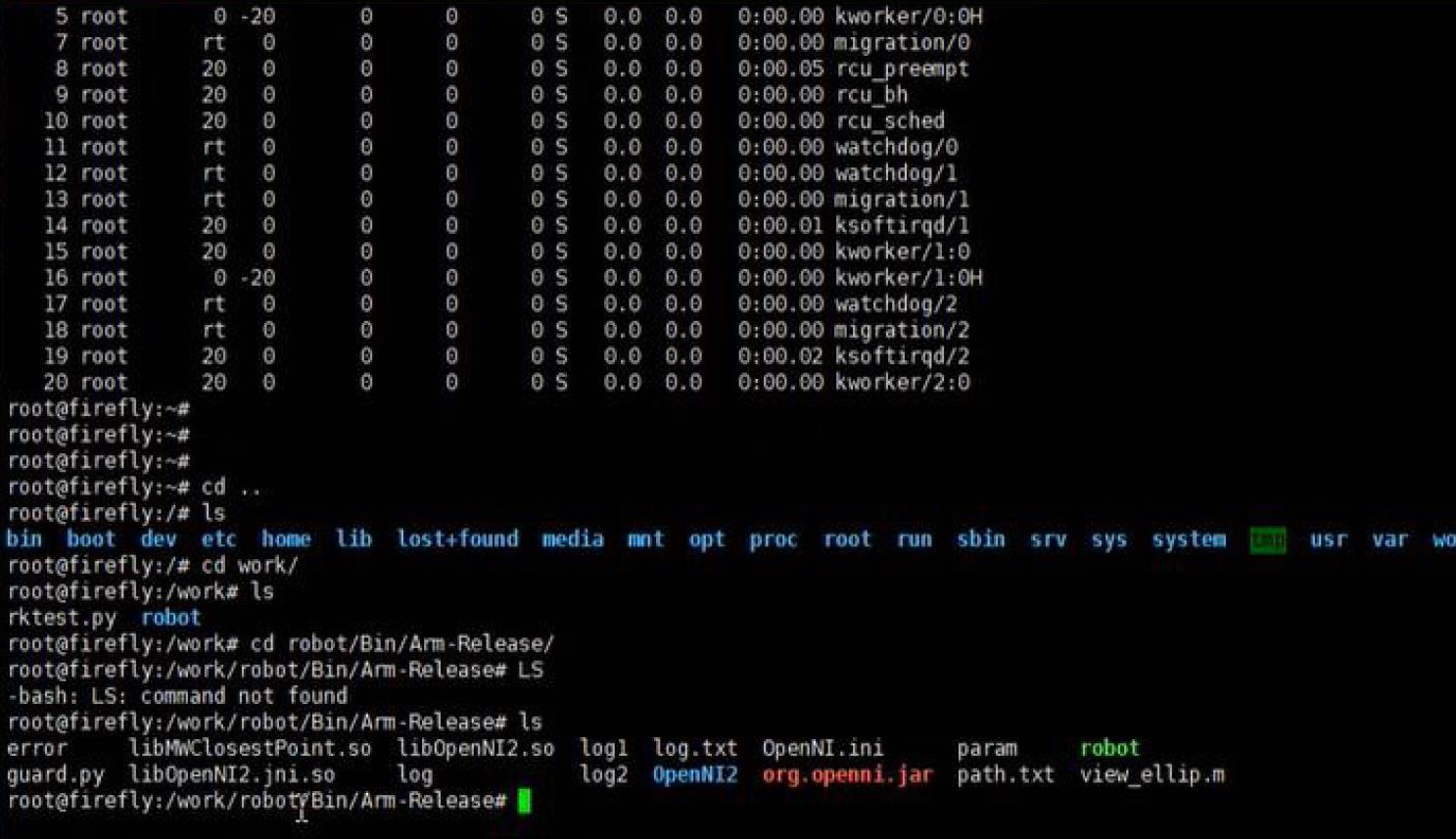
⑩上の図のようなものが表示され、終わった後に、./robot enter
⑪ロボットOSが再起動され、下記のような内容が表示されます、最後にロボットの再起動が成功しましたという表示が出たら完了。
なお、バージョン1.3以上のロボットをアップデートする際、下記の手順でもOKです、
ロボットOSのファイルはこちらへ
LiDar仕様の速度設定
LiDar仕様の製品は速度を調整可能です。
目的地”SLOW”に対して指定した速度で移動します。
– 準備 –
まず、PCにXshellをインストールしてください。 https://www.netsarang.com/en/xshell/
インストール後、以下の手順となります。
①本体の電源を入れ、Wifiアダプタを本体にセットします。
Wifiアダプタが動作していれば以下のようなアクセスポイントが確認できます。
PCのwifiを”keenon_robot_xxxxxxxx”へ接続します。

②Xshellを立ち上げssh peanut@192.168.64.20と入力、ENTER

③ パスワード入力画面が表示されたらkeenonrobotと入力、ENTER

④ cd /opt/ros/indigo/share/robot_settings/cfg/yamlと入力、ENTER

⑤ lsと入力、ENTER

⑥ sudo vim teb_local_planner_params.yaml と入力、ENTER

⑦ keenonrobotと入力、ENTER
※画面に文字は表示されません

⑧入力画面に変わります。
iキーを押します。”INSART”と表示され文字を入力できるようになります。
以下を入力します。※入力済みの際は数値を変更します。
# Robot
max_vel_x: 0.7 ← 数字が速度です。0.1から1.0まで指定できます。(推奨は0.3以上となります)

⑨入力が終わったらESCキーを押し終了します。
最後に:wqを入力、ENTER
以上で速度が変更されましたのでXshellを終了します。
本体を再起動すると速度が適用されます。